-
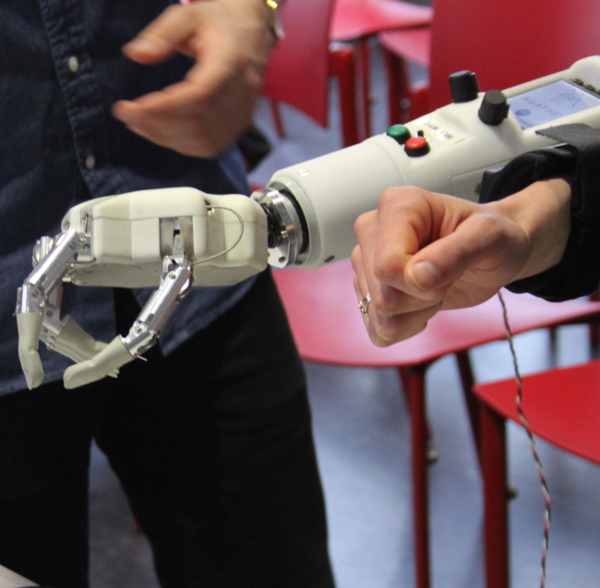
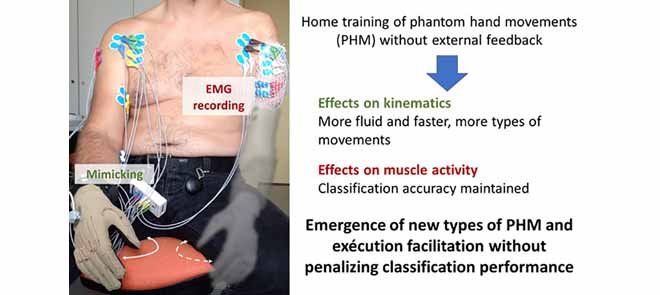
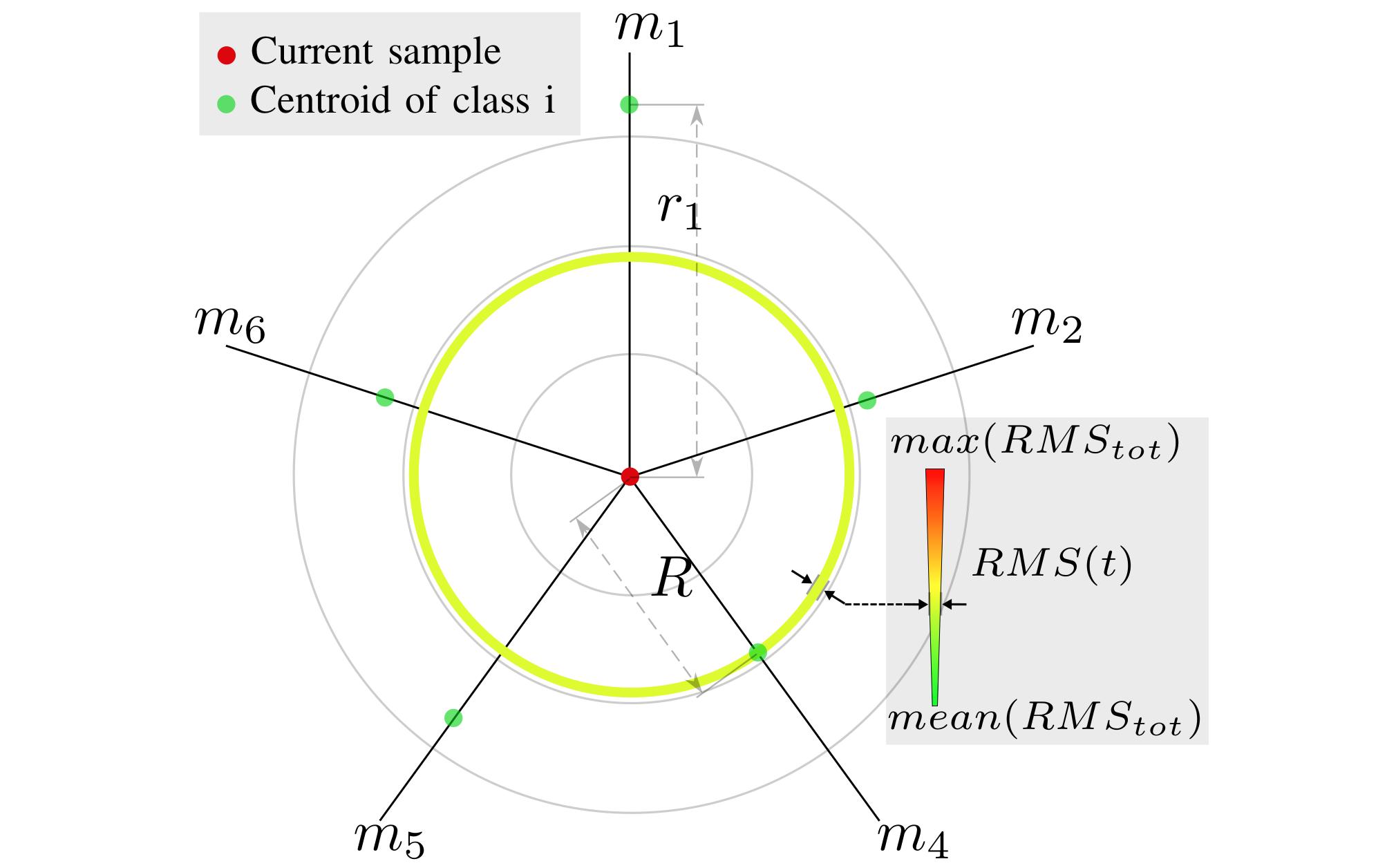
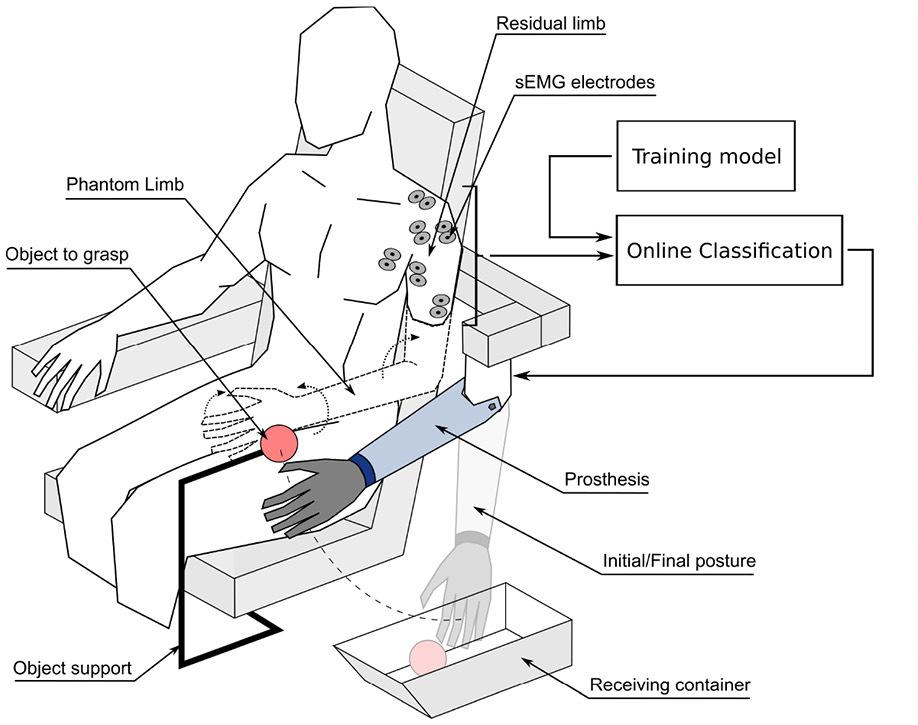
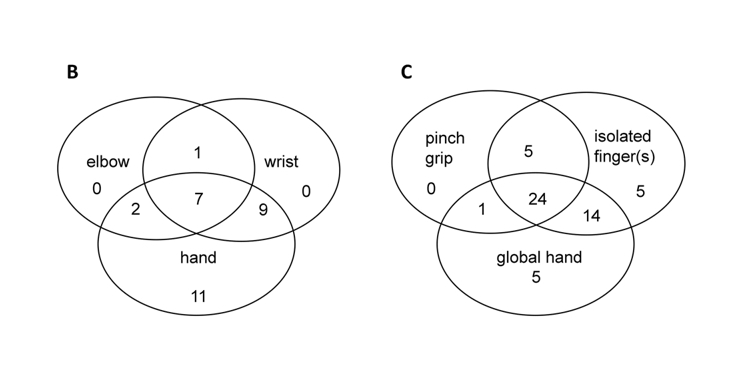
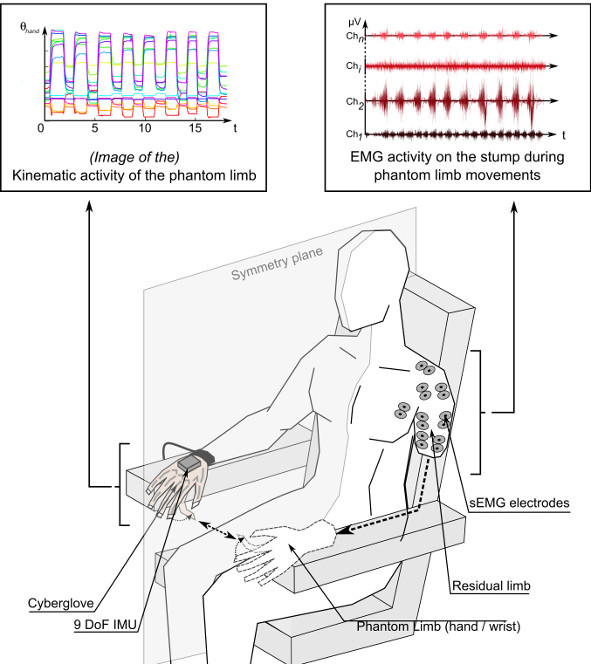
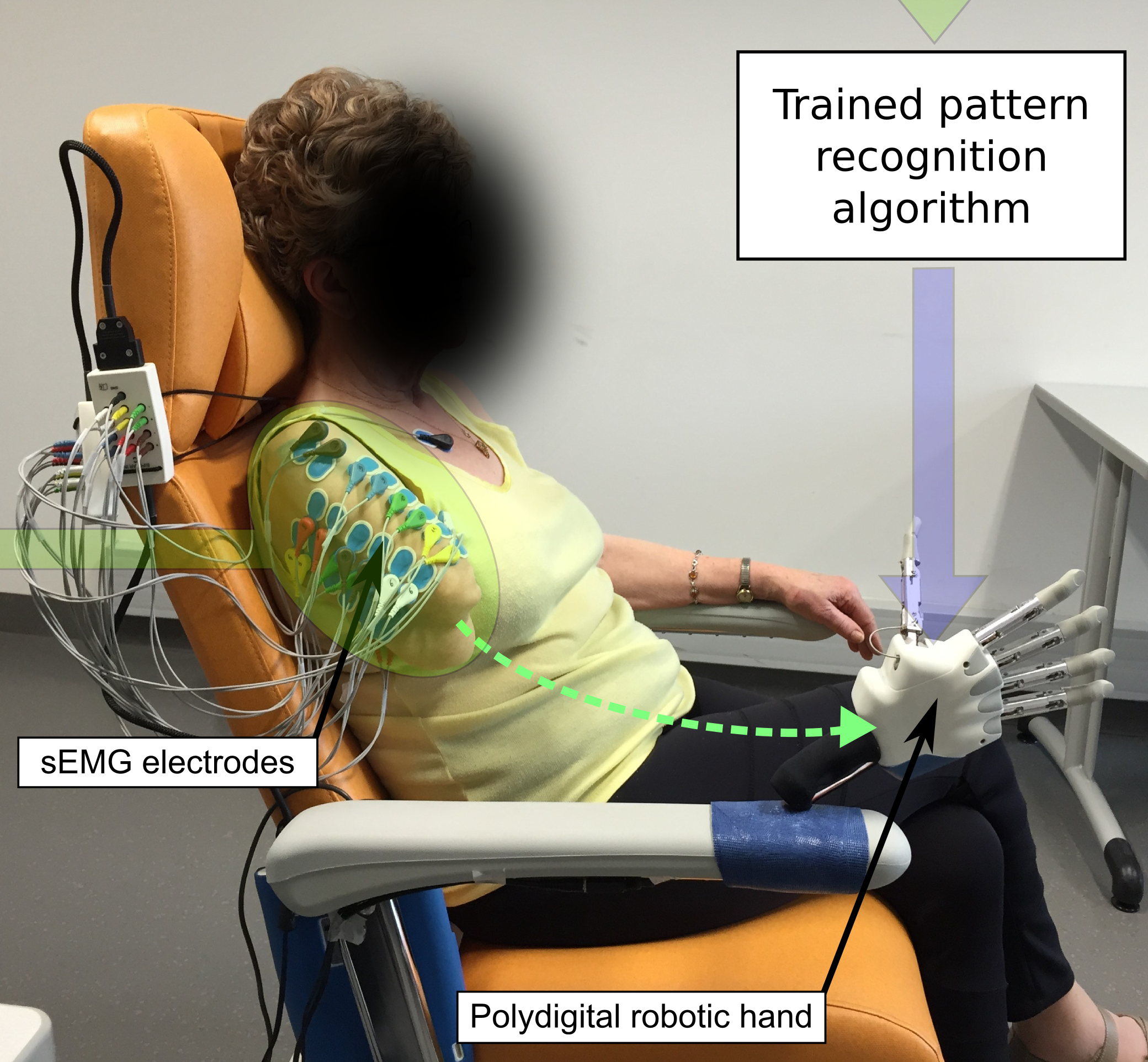
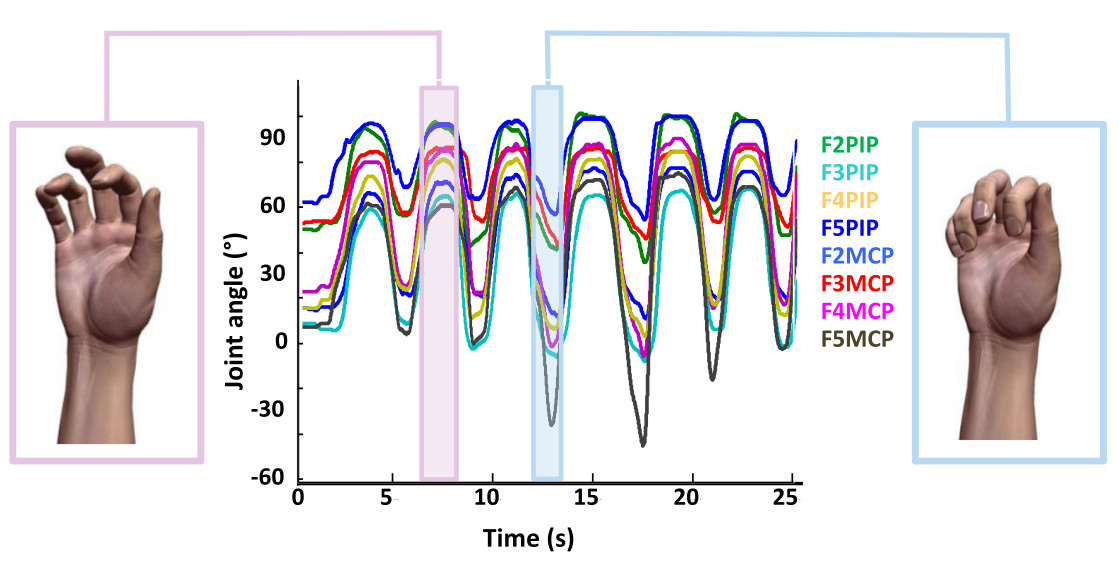
Phantom Limb Based myoeletric control in transhumeral amputees
Movement based control approaches
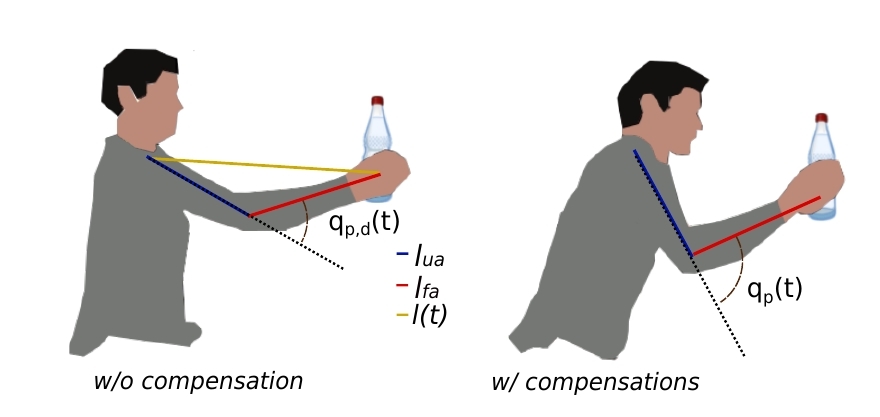
Closing the loop between body compensations and upper-limb prosthetic movements: a feasibility study
In IEEE Transactions on Medical Robotics and Bionics IEEE , volume 3 , 2021.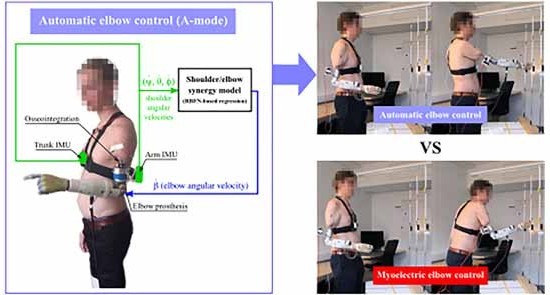
Assessment of an automatic prosthetic elbow control strategy using residual limb motion for transhumeral amputated individuals with socket or osseointegrated prostheses
In IEEE Transactions on Medical Robotics and Bionics , volume 1 , 2020.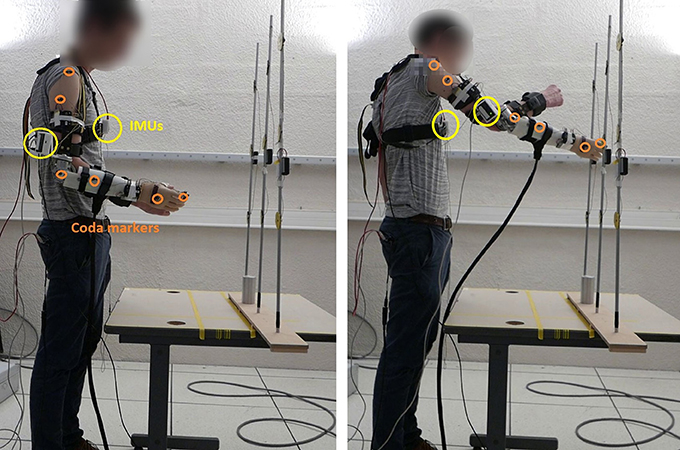
Movement-based control for upper-limb prosthetics: is the regression technique the key to a robust and accurate control?
In Frontiers in Neurorobotics Frontiers , volume 12 , 2018.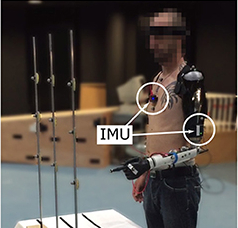
Can we achieve intuitive prosthetic elbow control based on healthy upper limb motor?
In Frontiers in Neurorobotics Frontiers , volume 12 , 2018.
Intuitive control of a prosthetic elbow
In Proceedings of the International Conference on Neurorehabilitation (ICNR) , 2016.
Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems , 2016.
Towards the implementation of natural prosthetic elbow motion using upper limb joint coordination
In Proc. of the 6th IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob) , 2016.Embodiment
Reachability and the sense of embodiment in amputees using prostheses
In Nature Scientific Reports , volume 7 , 2017.Sensory substitution for prosthetics
under construction
-

Innovative control approaches for lower-limb exoskeletons for assistance to paralyzed patients
Using Arm Swing Movements to Maintain the Walking State in a Self-Balanced Lower-Limb Exoskeleton
In 2022 International Conference on Robotics and Automation (ICRA) , 2022.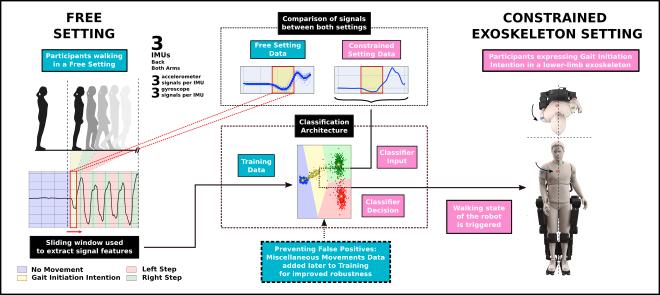
Using Generic Upper-Body Movement Strategies in a Free Walking Setting to Detect Gait Initiation Intention in a Lower-Limb Exoskeleton
In IEEE Transactions on Medical Robotics and Bionics , volume 2 , 2020.Control approaches of upper limb exoskeletons
Comparison of different error signals driving the adaptation in assist-as-needed controllers for neurorehabilitation with an upper-limb robotic exoskeleton
In in proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , 2017.
Modifying upper-limb inter-joint coordination in healthy subjects by training with a robotic exoskeleton
In Journal of NeuroEngineering and Rehabilitation , volume 14 , 2017.
Learning motor coordination under resistive viscous force fields at the joint level with an upper-limb robotic exoskeleton
In Converging Clinical and Engineering Research on Neurorehabilitation II , 2016.
Upper-Limb Robotic Exoskeletons for Neurorehabilitation: A Review on Control Strategies
In IEEE Reviews in Biomedical Engineering , volume 9 , 2016.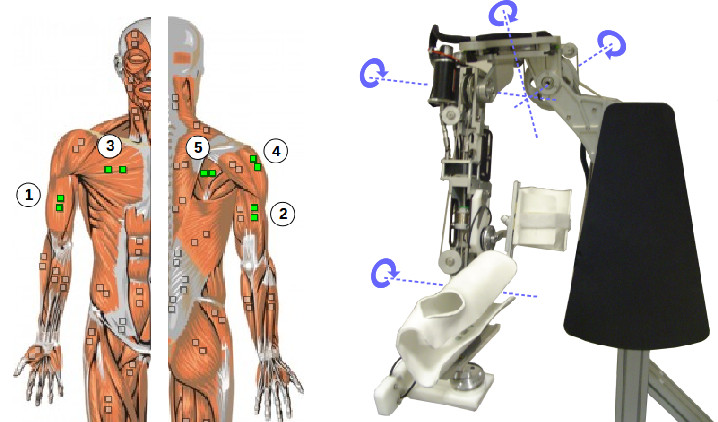
Adaptive control of a robotic exoskeleton for neurorehabilitation
In 2015 7th International IEEE/EMBS Conference on Neural Engineering (NER) IEEE , volume 1 , 2015.
Robotic exoskeletons: a perspective for the rehabilitation of arm coordination in stroke patients
In Frontiers in Human Neuroscience , volume 8:947 , 2014.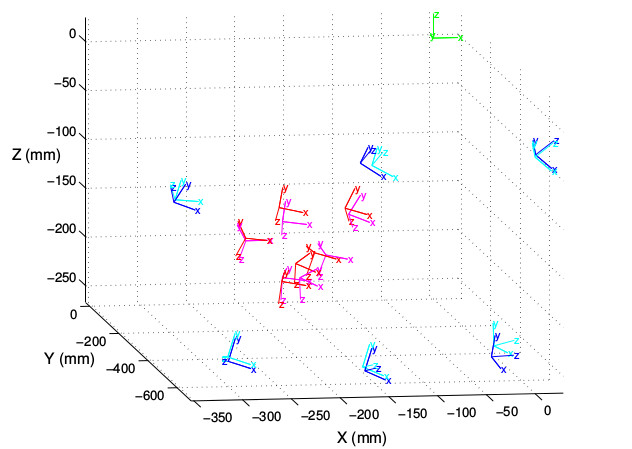
A method for measuring the upper limb motion and computing a compatible exoskeleton trajectory
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'12) , 2012.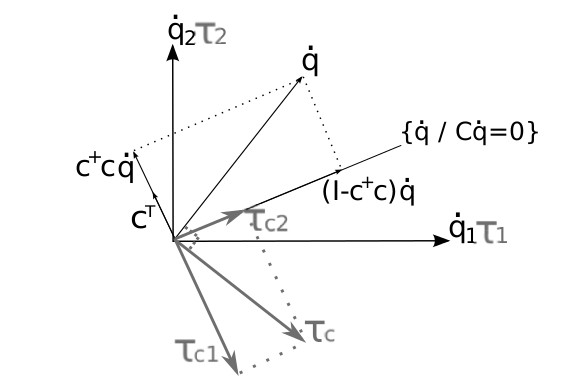
Changing human upper-limb synergies with an exoskeleton using viscous fields
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'11) , 2011.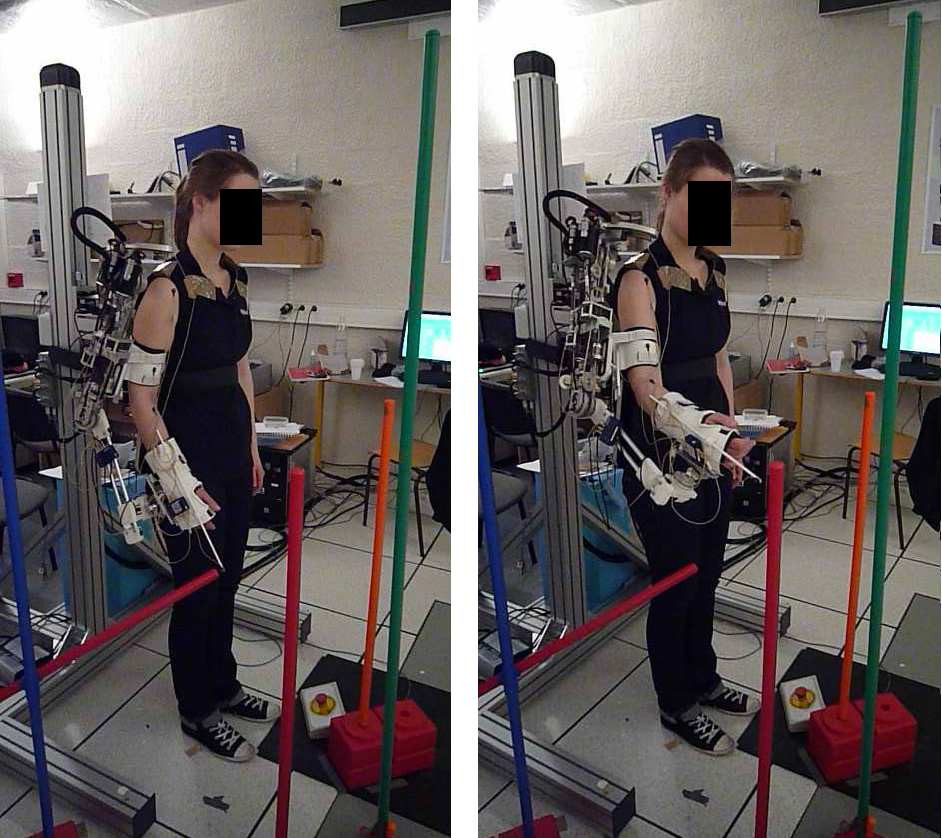
A methodology to quantify alterations in human upper limb movement during co-manipulation with an exoskeleton
In IEEE in Transactions on Neural Systems and Rehabilitation Engineering , volume 18 , 2010.
How can human motion prediction increase transparency?
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'08) , 2008.Isostaticity in the coupling of human limb to exoskeletons
Connecting a Human Limb to an Exoskeleton.
In IEEE Transactions on Robotics , volume 28 , 2012.
Formal Methodology for Avoiding Hyperstaticity When Connecting an Exoskeleton to a Human Member
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'10) , 2010. -

-
Design of rehabilitation and assesment devices
My research focuses on the development of instrumented objects and simple devices for assessment and rehabilitation of upper limb.Instrumented objects
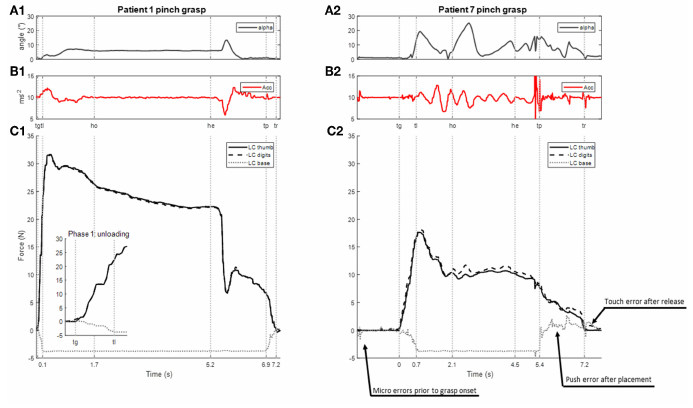
Effects of hand configuration on the grasping, holding and placement of an instrumented object in patients with hemiparesis
In Frontiers in Neurology Frontiers , volume 10 , 2019.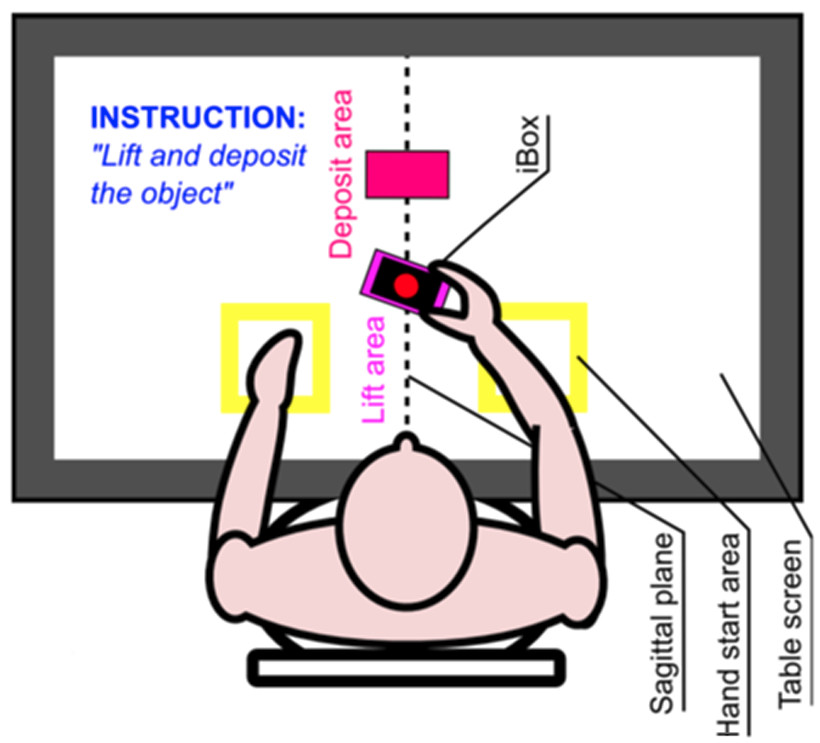
Taxonomy based analysis of force exchanges during multi-digital object grasping and manipulation
In Plos One Public Library of Science , volume 12 , 2017.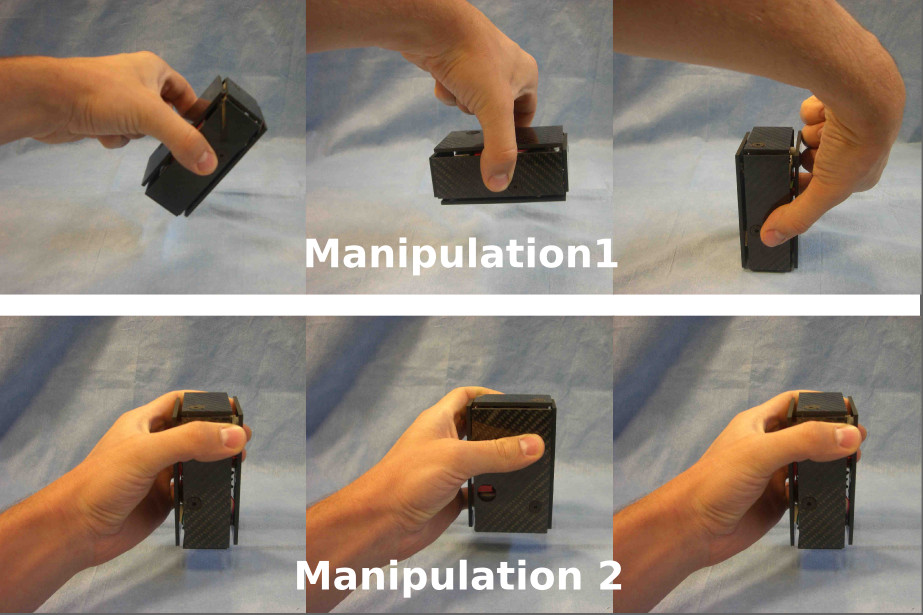
Analysis of grasping strategies and function in hemiparetic patients using an instrumented object
In Proceedings of the 13th International Conference on Rehabilitation Robotics (ICORR) , 2013.Simple exoskeletons
Ergonomic Design of a Wrist Robot: the Influence of Hyperstaticity on Reaction connecting Forces and Motor Strategies
In International Journal of Intelligent Computing and Cybernetics , volume 7 , 2014.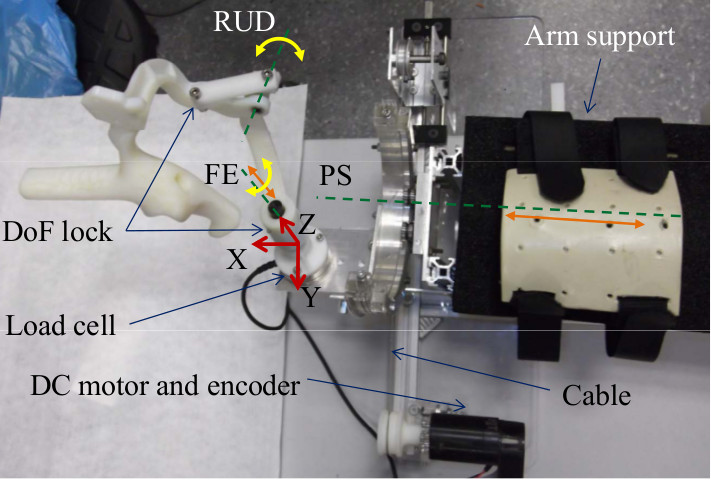
Hyperstaticity for Ergonomic Design of a Wrist Exoskeleton
In Proceedings of the 13th International Conference on Rehabilitation Robotics (ICORR) , 2013.Analysis of human sensorimotor control
Characterisation of grasping and manipulation
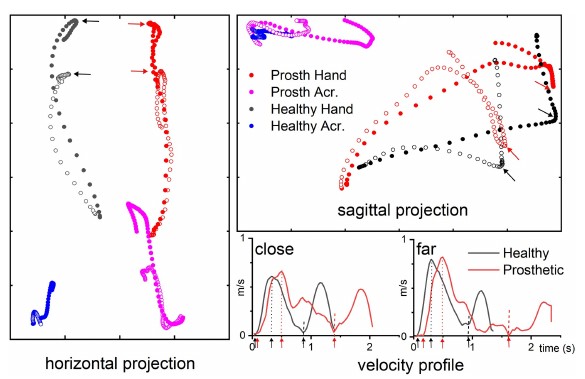
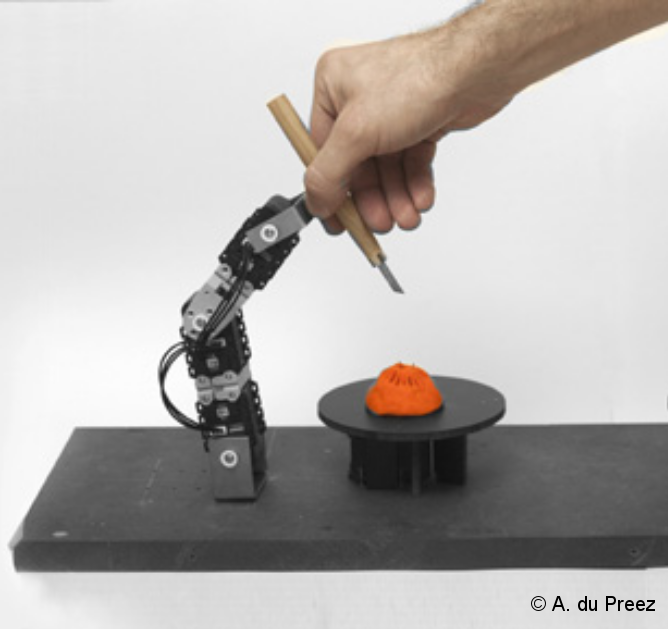
Kinematic analysis of impairments and compensatory motor behavior during prosthetic grasping in below-elbow amputees
In PLOS One , volume 17 , 2022.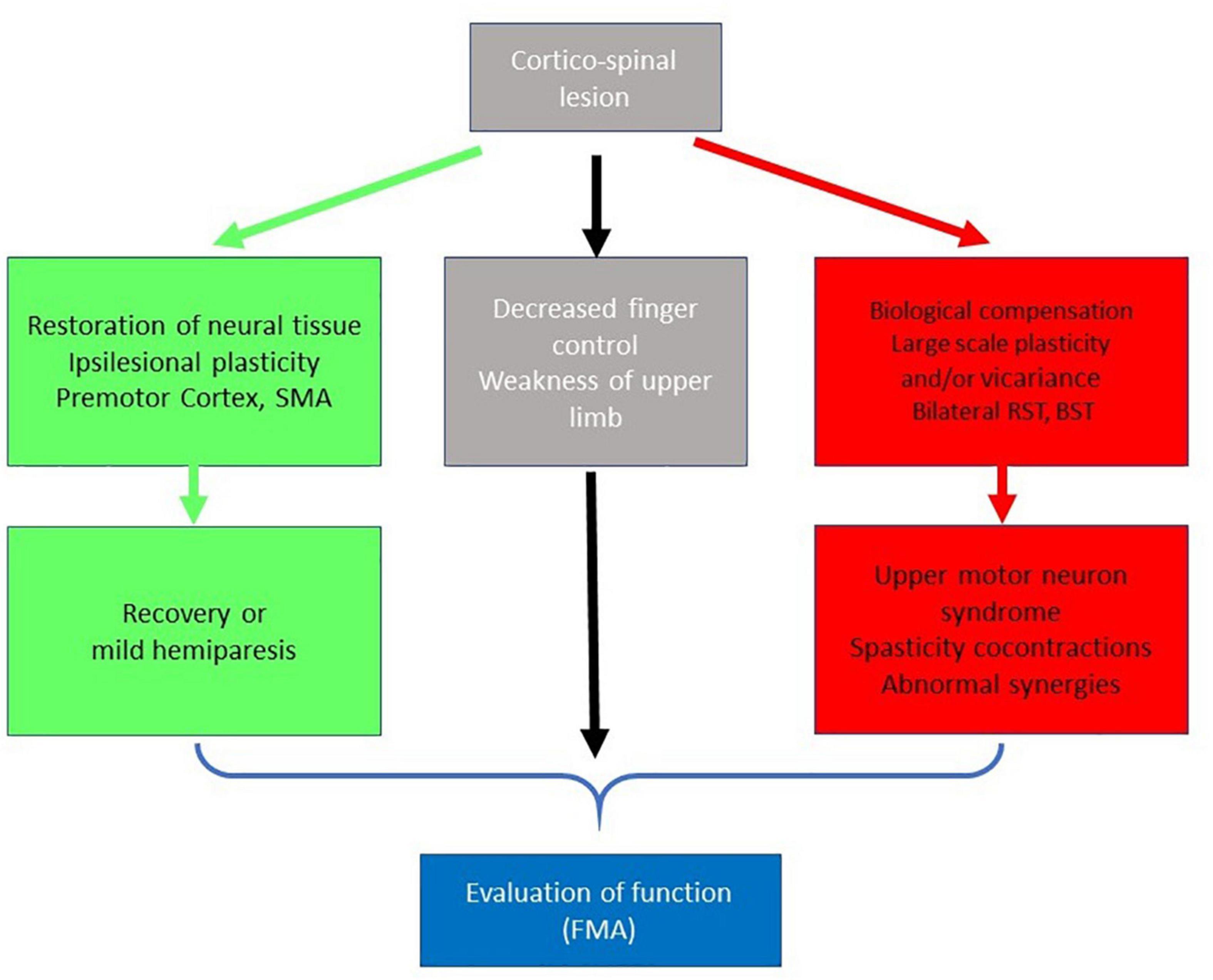
Impairment and Compensation in Dexterous Upper-Limb Function After Stroke. From the Direct Consequences of Pyramidal Tract Lesions to Behavioral Involvement of Both Upper-Limbs in Daily Activities
In Frontiers in Human Neuroscience , volume 15 , 2021.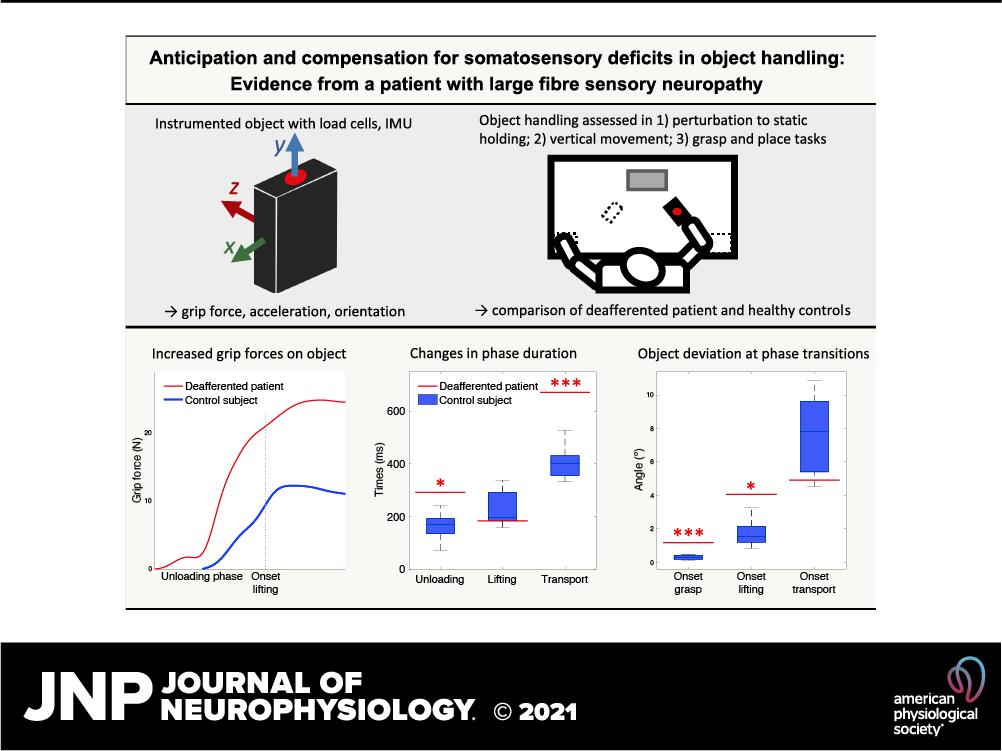
Anticipation and compensation for somatosensory deficits in object handling: evidence from a patient with large fibre sensory neuropathy
In Journal of Neurophysiology , volume 0 , 2021.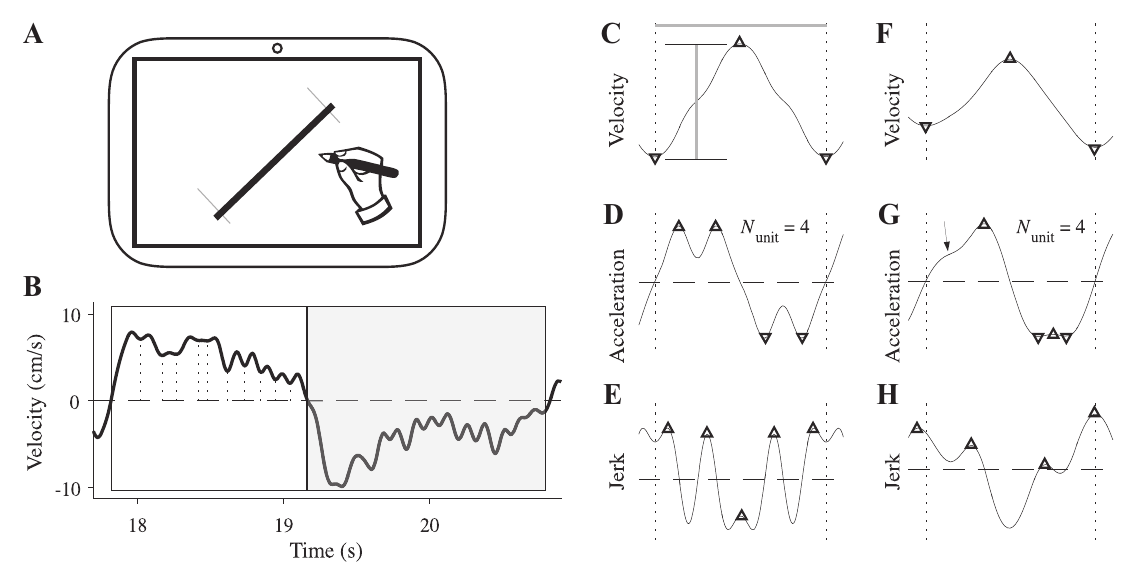
Experimental and theoretical study of velocity fluctuations during slow movements in humans
In Journal of neurophysiology , volume 2 , 2019.Taxonomy based analysis of force exchanges during multi-digital object grasping and manipulation
In Plos One Public Library of Science , volume 12 , 2017.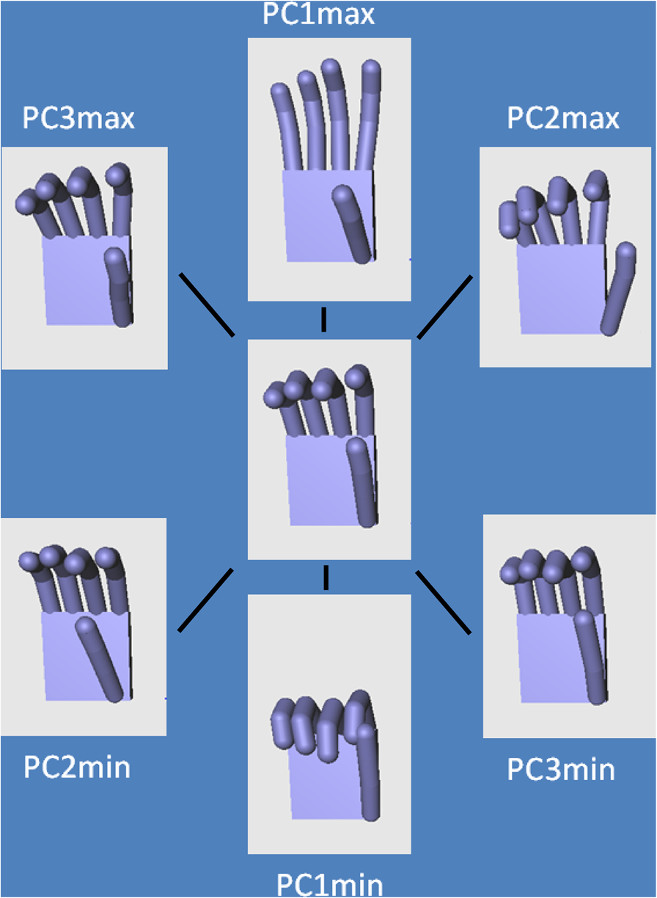
Analysis of hand synergies in healthy subjects during bimanual manipulation of various objects
In Journal of NeuroEngineering and Rehabilitation , volume 11 , 2014.Joint coordination and adaptation to perturbation
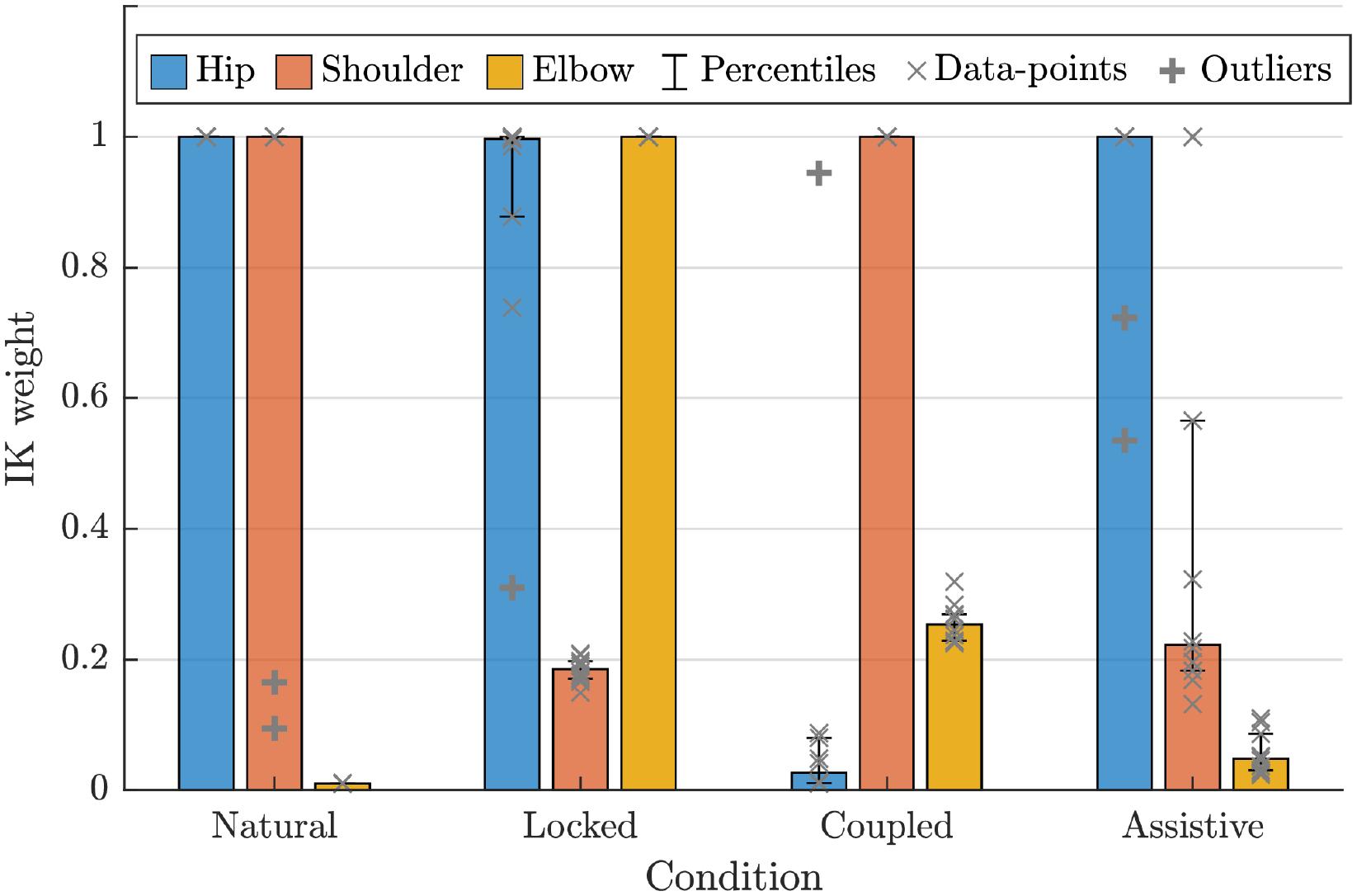
Identification of inverse kinematic parameters in redundant systems: Towards quantification of inter-joint coordination in the human upper extremity
In PLOS One , volume 17 , 2022.Experimental and theoretical study of velocity fluctuations during slow movements in humans
In Journal of neurophysiology , volume 2 , 2019.Effects of hand configuration on the grasping, holding and placement of an instrumented object in patients with hemiparesis
In Frontiers in Neurology Frontiers , volume 10 , 2019.Modifying upper-limb inter-joint coordination in healthy subjects by training with a robotic exoskeleton
In Journal of NeuroEngineering and Rehabilitation , volume 14 , 2017.Learning motor coordination under resistive viscous force fields at the joint level with an upper-limb robotic exoskeleton
In Converging Clinical and Engineering Research on Neurorehabilitation II , 2016. -
Roles in human-robot dyads
Intent-aware control in kinematically redundant systems: Towards collaborative wearable robots
In 2021 IEEE International Conference on Robotics and Automation (ICRA) , 2021.
Slaves no longer: review on role assignment for human-robot joint motor action
In Adaptive Behavior (SAGE) , 2014.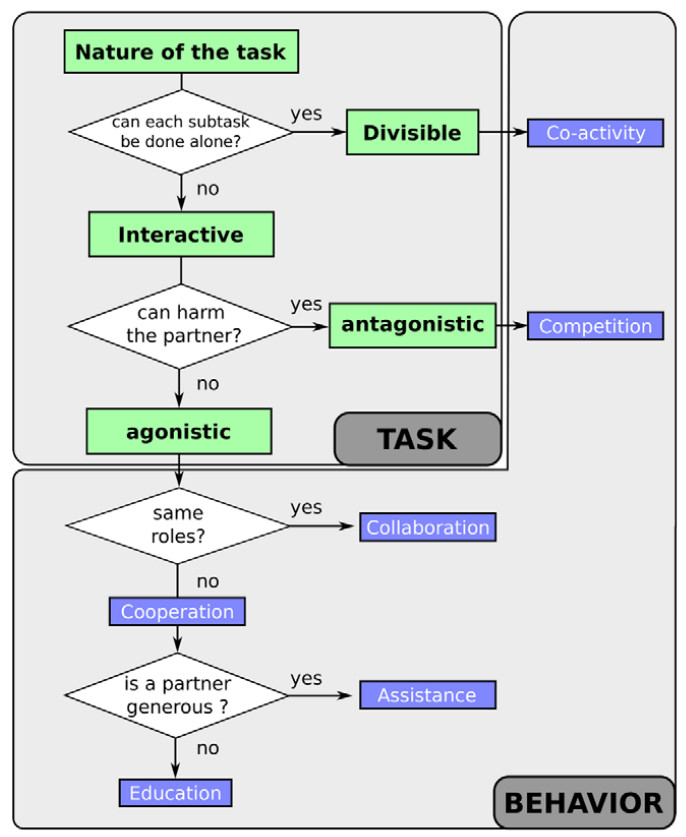
A Framework to Describe, Analyze and Generate Interactive Motor Behaviors
In PLoS ONE , volume 7 , 2013.Biomimetic control
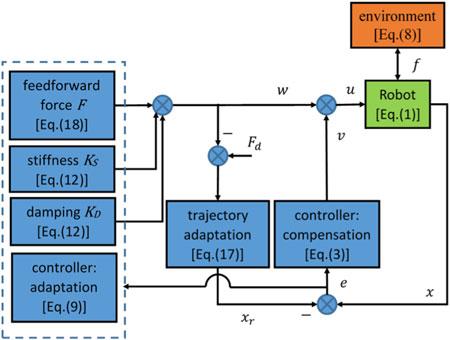
Force, Impedance and Trajectory Learning for Contact Tooling and Haptic Identification
In IEEE Transactions on Robotics , volume 35 , 2018.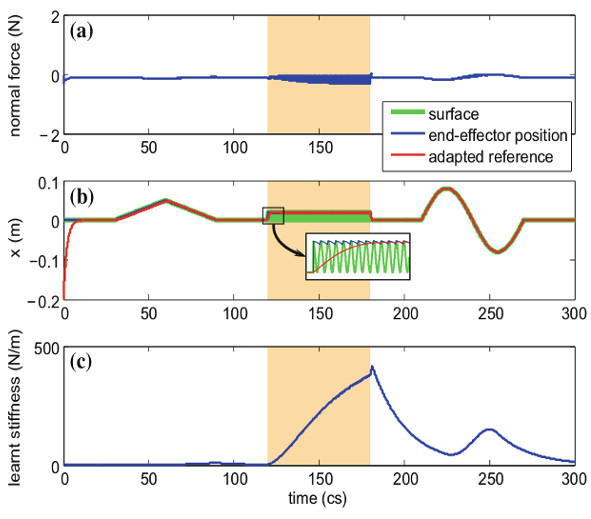
Versatile Interaction Control and Haptic Identification in Humans and Robots
Chapter in Geometric and Numerical Foundations of Movements (Springer, ed.) , volume 117 , 2017.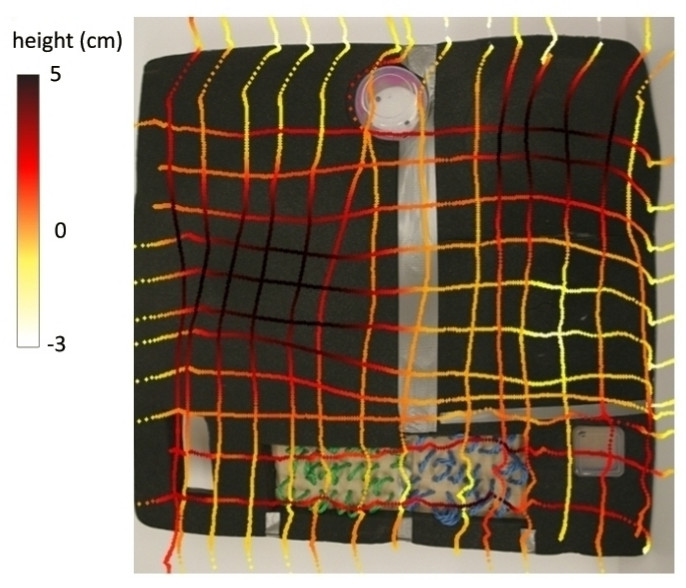
A Versatile Biomimetic Controller for Contact Tooling and Tactile Exploration
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'12) , 2012. -

Socio-anthropological and cultural phenomena influencing the appropriation of technical objects
L’ambivalence de l’enchantement prothétique contemporain
Chapter in Corps et Prothèses Presses Universitaires de Grenoble , 2020.
Prothèses robotiques : vers un nouveau dualisme?
Chapter in L'humain et ses prothèses: Savoirs et pratiques du corps transformé (Editions CNRS, ed.) , 2017. (978-2-271-11416-7)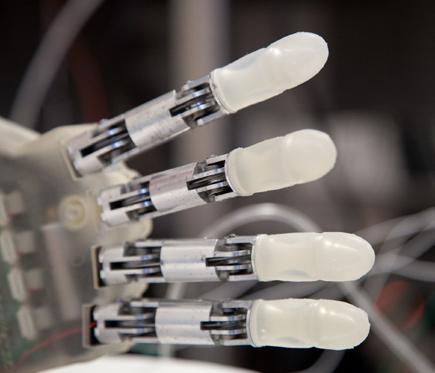
Robotic prostheses: what do they actually mean for the patient?
In Human Body In Motion Journal , volume 1 , 2017.
Robotic Prosthetics : Moving Beyond Technical Performance. (A study of socio-anthropological and cultural phenomena influencing the appropriation of technical objects interacting with the body)
In IEEE Technology and Society Magazine , volume 34 , 2015.Human Enhancement Technologies

The Ethics of Supernumerary Robotic Limbs. An Enactivist Approach
In Science and Engineering Ethics , volume 28 , 2022.
Cyborg et corps artificiel
Chapter in Vers le cyber-monde: Humain et numérique en interaction (CNRS Editions, ed.) , 2021.
Membres et organes artificiels: le mythe et la fabrique des surhommes
Chapter in "Vers de nouvelles humanités ? L'humanisme juridique face aux nouvelles technologies" (Dalloz, ed.) , volume 59 , 2017.
The Myth of Human Enhancement
CNRS News , 2017.